Use this command to apply a force in a particular direction instead of maintaining/following a reference position.
Fieldbus Interface
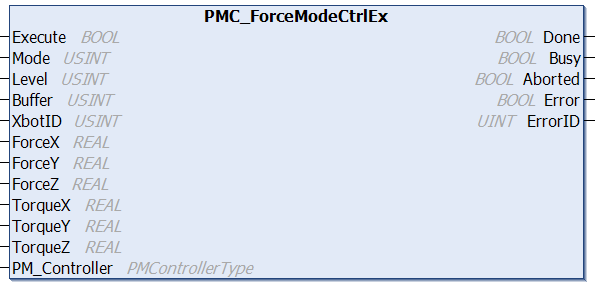
PMC_ForceModeCtrlEx
Inputs
Name
Data Type
Description
Execute
BOOL
Execution of the function block begins on a rising edge of this input.
Mode
USINT
0: Absolute Force Mode; 1: Relative Force Mode (relative to current force output in the specified axis)
Level
USINT
Bitmap of which axis to enable force mode for. Bit = 1 means enable force mode for that axis, 0 means enable position mode for that axis. Bit0: Fx; Bit1: Fy; Bit2: Fz; Bit3: Tx; Bit4: Ty; Bit5: Tz
Buffer
USINT
0: Enter / exit force mode immediately
1: Enter / exit force mode command will be added to the specified mover's motion buffer. If an enter force mode command is added to a macro, then an exit force mode command must also be added after it. If not, an exit force mode command will be automatically added at the end of the macro
XbotID
USINT
ID of the XBot. Real XBot IDs [1,78].
ForceX
REAL
When applicable, the desired X force in Newtons.
ForceY
REAL
When applicable, the desired Y force in Newtons.
ForceZ
REAL
When applicable, the desired Z force in Newtons.
TorqueX
REAL
When applicable, the desired torque in Rx in Newton-meters.
TorqueY
REAL
When applicable, the desired torque in Ry in Newton-meters.
TorqueZ
REAL
When applicable, the desired torque in Rz in Newton-meters.
PM_Controller
PMControllerType
Data structure that specifies which PMC to connect to. There should be only 1 instance of this variable for each connected PMC.
Outputs
Name
Data Type
Description
Done
BOOL
Execution successful. Function block is finished. (Note: Done will not become TRUE if Execute is already FALSE)
Busy
BOOL
Function block is active and must continue to be called.
Aborted
BOOL
Command aborted by another command.
Error
BOOL
If there is an error in processing the command, then Error = TRUE, otherwise, FALSE.
XBot is in the Idle state, Obstacle Detected state, Motion state, Stopped state, Hold Position state, or Waiting state.
Postconditions
The XBot will enter or exit Force Mode, as specified
Description
Use this command to apply a force in a particular direction instead of maintaining/following a reference position.
The force command allows the user to apply a force in a chosen orientation, while disabling position control in that direction. While the XBot is in force mode, it is possible to move the XBot using the linear motion command as long as the axes affected by the motion command are not in force mode.
Force mode command is specified by providing the X, Y, Z, RX, RY, RZ components of the desired force/torque.
Behaviour During Obstacles
If Force Mode is enabled in Z only, the XBot will still be able to resume its motion in the event of an obstacle. Otherwise, the XBot will enter the Stopped State and its motion will not be resumed even if the obstacle XBot is moved away. The motion command needs to be sent again.