
Use a digital input to cause an XBot to run a Motion Macro. See Send Digital Input to PMC
Fieldbus Interface
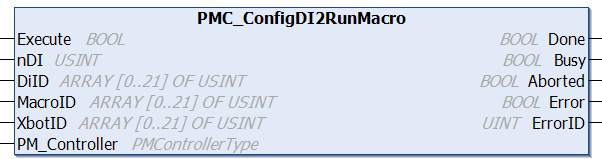
PMC_ConfigDI2RunMacro
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
None |
|
Postconditions |
When the specified Digital Input(s) is turned on, the specified XBot(s) will run the specified Motion Macro(s) or add the macro to its motion buffer |
Description
Use a digital input to cause an XBot to run a Motion Macro.
If the XBot is idle, turning on the digital input will run the motion macro immediately. If the XBot is executing a command, turning on the digital input will add the motion macro to the XBot’s motion command buffer.