This command is used to create an Auto Loading Zone for either loading or unloading XBots onto the Flyway. After the zone is created, it has to be activated using Activate Auto Loading Zone before it can be used.
Fieldbus Interface
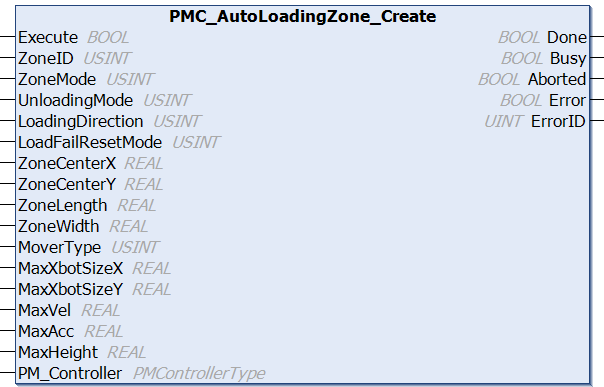
PMC_AutoLoadingZone_Create
Inputs
Name
Data Type
Description
Execute
BOOL
Execution of the function block begins on a rising edge of this input.
ZoneID
USINT
Zone ID, valid range [1,40]
ZoneMode
USINT
0: Unloading Zone (remove XBot from Flyway); 1: Loading Zone (add XBot to Flyway)
UnloadingMode
USINT
When ZoneMode = 0, then
0: XBot stops motion before Unloading
1: XBot directly transitions from its current motion to unloading
2: Conveyor will completely load / unload the XBot onto the Flyway, without requiring any pulling or pushing action from the Flyway
LoadingDirection
USINT
0: Auto
1: Loading from +X
2: Loading from -X
3: Loading from +Y
4: Loading from -Y
LoadFailResetMode
USINT
0: Auto reset loading zone; 1: Manual reset loading zone
ZoneCenterX
REAL
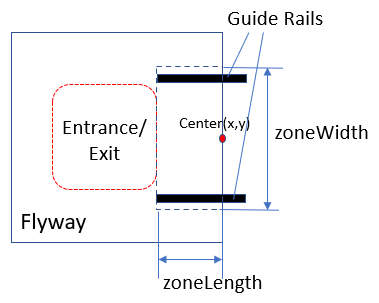
Center of the Flyway-Conveyor interface at the Flyway edge, x position, meters
ZoneCenterY
REAL
Center of the Flyway-Conveyor interface at the Flyway edge, y position, meters
ZoneLength
REAL
Length of the supports/guide rails as they extend into the Flyway. This value may be 0. If value is > 0, then there will be a barrier along the specified length and width of the zone when it is active. In meters
ZoneWidth
REAL
Width of the XBot or the supports/guide rails for the XBot, whichever is larger. Please note if the supports are smaller than the XBot, consideration should be given to the deviation from the ideal path as the XBot travels along the guide rails without 6D control. An XBot is allowed to extend beyond the Auto Load zone width boundary by a maximum of 0.2mm during travel. In meters
MoverType
USINT
0: Default from configuration; >0: Specific XBot type
MaxXbotSizeX
REAL
X size of XBot being loaded or unloaded, meters
MaxXbotSizeY
REAL
Y size of XBot being loaded or unloaded, meters
MaxVel
REAL
Maximum velocity used by the XBot during loading/unloading
MaxAcc
REAL
Maximum acceleration used by the XBot during loading/unloading
MaxHeight
REAL
When Unloading Mode = 2, this is the maximum detection z height for a landed mover at the loading area (m) (0 = no limit)
PM_Controller
PMControllerType
Data structure that specifies which PMC to connect to. There should be only 1 instance of this variable for each connected PMC.
Outputs
Name
Data Type
Description
Done
BOOL
Execution successful. Function block is finished. (Note: Done will not become TRUE if Execute is already FALSE)
Busy
BOOL
Function block is active and must continue to be called.
Aborted
BOOL
Command aborted by another command.
Error
BOOL
If there is an error in processing the command, then Error = TRUE, otherwise, FALSE.
The specified Auto Loading Zone will be created, but not activated
Description
This command is used to create an Auto Loading Zone for either loading or unloading XBots onto the Flyway. After the zone is created, it has to be activated using Activate Auto Loading Zone before it can be used.
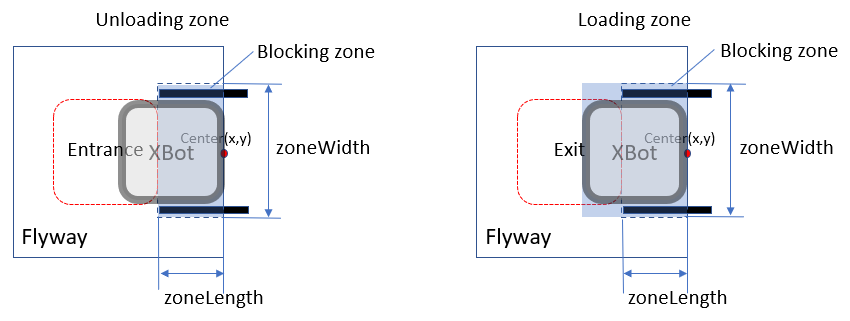
The blocking zone (which is where the fence will be built once the Auto Loading Zone is activated) may be different from the ZoneWidth and ZoneLength configured.
Width: For both Loading and Unloading, it will be maximum(ZoneWidth, XBot Size).
Length: For Unloading, it will be ZoneLength. For Loading, it will be maximum(ZoneLength, XBot Size).