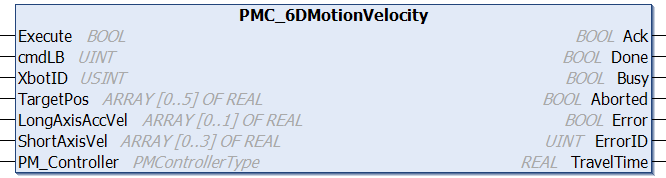
Time required to complete this command, in seconds
Conditions
Operating Conditions
Preconditions
XBot is in the Idle state, Obstacle Detected state, Motion state, Stopped state, Hold Position state, or Waiting state.
Postconditions
If the XBot is ready to immediately begin executing the command, then the XBot will enter the Motion state. Otherwise, the XBot state remains unchanged, but the command will be added to the XBot's motion buffer.
Description
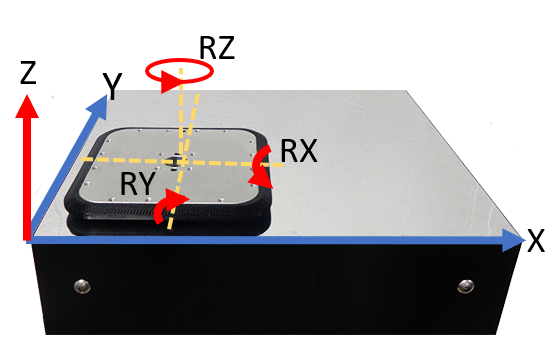
Typically, all 6 axis move towards their respective target positions at the same time. In some special situations, however, some axis may move before others. For example:
If the target position requires Z to be a certain height before the target RX or RY tilt can be achieved, the XBot will move in the Z direction first, before moving in RX or RY
If the target X & Y positions are at the boundary of the Flyway, with RZ = 0, and the initial RZ is not 0, the XBot will first move in the RZ direction before proceeding in the X & Y directions. Otherwise, a corner of the XBot will extend beyond the Flyway boundary